*Enterprise-IoT
*Smart Machine 사례연구
*Middleware 사례연구
*AI·Big Data 사례연구
*IoT 사례연구
*Smart Thinks 사례연구
*정부정책동향 사례연구
*K-SmartFactory
*Hidden Champion
*카드뉴스
*국내외 동향 리포트

이 문서의 번역:
j. 결과
아래 스크린 샷은 회의 장소 BCC, 작업 항목으로 사용되는 엔진, NEXO 너트 러너를 포함하여, Dassault Systèmes의 3DExperience 제품 (주로 CATIA와 DELMIA)를 사용하여 생성된 디지털 모델의 개요를 제공한다. 회의 장소 모델의 오른쪽 하단에서 당신은 3개의 작은 원 (빨강, 녹색)을 볼 수 있다. 이들은 NEXO의 위치를 나타낸다. Cisco 실내 위치 파악 기술을 사용하여, 우리는 3차원 모형에서 NEXO의 움직임을 추적할 수 있다.
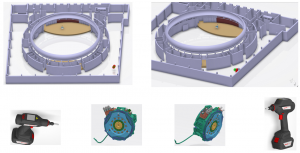
Test environment – 3D models
우리가 예를 들어 살펴보고자 하는 다음 것은 작업 항목을 기준으로 도구의 위치를 추적하기 위한 고정밀 위치 측정 기술을 사용할 수 있는 능력이다. 데모의 경우, 우리는 또한 도구를 작동하는 사람의 움직임을 보여주고 싶었다. 우리는 Haption 및 Xsens의 기술을 결합하여 이를 달성했다. 아래 그림에서는 많은 Xsens 센서를 입고 있는 조작자를 볼 수 있다. 이 조작자는 3D 모델으로 묘사되어 있다. 이는 Dassault Systèmes 3DExperience 플랫폼에 의해 가능하게 되었으며 Haption 기술을 사용하여 업데이트된다. 실제 조작자에 의해 수행되는 각 움직임은 3차원 모델의 아바타의 동일한 움직임에 의해 미러링된다. 또한 이 시스템은 특정 움직임의 사전 기록을 허용하는 가상 훈련 시설을 제공한다. 시스템은 조작자의 움직임을 따르고, 사전 정의된 연속 동작을 올바르게 따르지 않으면 에러 메시지를 전송한다.

Physical operator and virtual avatar
성공적으로 기본 체결 훈련을 완료하면, 조작자는 실제의 체결 이동 자체를 수행한다. 다음 그래프에서, 우리는 포털로부터의 해당 체결 수행 데이터를 볼 수 있다. 이 데이터는 실시간으로 NEXO에서 백엔드로 무선 인터넷을 통해 전송된다.
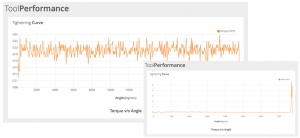 Tightening performance
Tightening performance
계기판으로부터의 다음 발췌는 운영 장비 효율 (OEE) 및 도구 집단 성능에 대한 네 가지의 선택된 KPI를 보여준다.
 Dashboard
Dashboard
그리고 마지막으로, 아래 스크린 샷은 도구 집단의 개요뿐만 아니라 개별 도구의 상태를 제공한다.

Tool fleet overview and details
물론, 이 중 어느 것도 훌륭한 팀 없이는 불가능했다. 여러 번 논의된 것처럼 (예를 들어, “Clash of Two Worlds” 참조), IoT 프로젝트의 주요 과제 중 하나는 여러 학문 분야에 걸친 접근법의 필요성이며, 이 프로젝트도 예외는 아니었다. 아래 그림에서 당신은 이 프로젝트가 수행하기 위해 함께 일한 여러 분야의 전문가들을 볼 수 있다. Tech Mahindra의 N. Ramanathan (“NR”)과 C. Rajeswaran, Bosch SI의 C. Thiemich, F. Puhlmann과 D. Slama, Dassault의 J. Veaux-Logeat과 G. Shenoy, Cisco의 D. Vasilev (“Mitko”), Haption의 A. Geneslay와 Q. Parent.

The Team
마지막 데모가 성공적으로 베를린에서 열린 Bosch ConnectedWorld 2015에서 Bosch Group 회장인 Volkmar Denner 박사와 함께 공개되었다.
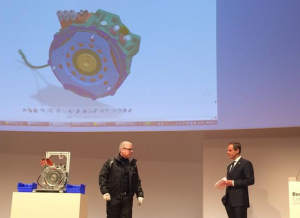 Track & Trace demo at Bosch ConnectedWorld 2015
Track & Trace demo at Bosch ConnectedWorld 2015
이 문서의 번역:
